Liddll
Servus Freunde des drehbaren Blechs  ,
,
möchte mal eine neue Bastelei vorstellen inspiriert vom letzten Sattreffen zum Thema Polarizer von Keuz und DigiSat.
Ziel ist Schrittmotoren, BLDC, Sensoren, etc. direkt über DiSEqC-Befehle zu steuern.
Aufgebaut ist das ganze Modular als Bussystem, d.h. jeder Motortreiber oder jede Sensorschnittstelle erhält eine eigene Platine. Es lässt sich so flexibel erweitern.
Die Übertragung der Daten erfolgt von der CPU-Einheit via CAN-Bus oder I²C. CAN eher gedacht für externe Sensoren o. Geräte mit langen Leitungen. I²C erfolgt auf dem Bus ebenfalls über Differential (PCA9616) um Störungen zu vermeiden. Jede Einheit hat eine eigene wählbare Adresse. Abmessungen je Komponente 5x10cm für Sensoranschlüsse 5x5cm. Diese Größen lassen sich (auch 4-lagig) recht günstig in China fertigen.
CPU Einheit:
- Die Stromversorgung erfolgt im Ruhezustand über den Tuner, sobald es am Bus Arbeit gibt wird ein externes Netzteil zugeschalten um z.B. die Motortreiber zu speisen. Anschließend geht das System wieder in den Standby.
- 2x F-Buchsen zum Durchschleifen
- LAN für WebInterface und Updates
- 32-Bit CPU (PIC32)
- zusätzlich ext. Serieller 1Mbit SQI-RAM und 64Mbit SQI-Flash
- 128x128 RGB-OLED Display für Statusanzeige
- 24-Bit RGB LED Meter
- USB für Updates
- WiFi
- Drehencoder für Bedienung
Motor-Treiber:
- für kleine Schrittmotoren (bis 0,5A á Phase) Treiber (Trinamic TMC260) mit internem Mosfet Stromversorgung über Bus 12V max. 1,5A
- für große Schrittmotoren (max. 8A á Phase) Treiber (TMC262) mit externen Mosfet Stromversorgung über Hochstromschraubkontakte an Busplatine (gleichzeitig Befestigung)
- evtl. noch Treiber für 3-Phasen Gleichstrommotoren
Sensoren:
- Endschalter
- Winkelsensoren
- Kompasssensoren
Sonstiges:
- z.B. Relaisplatine
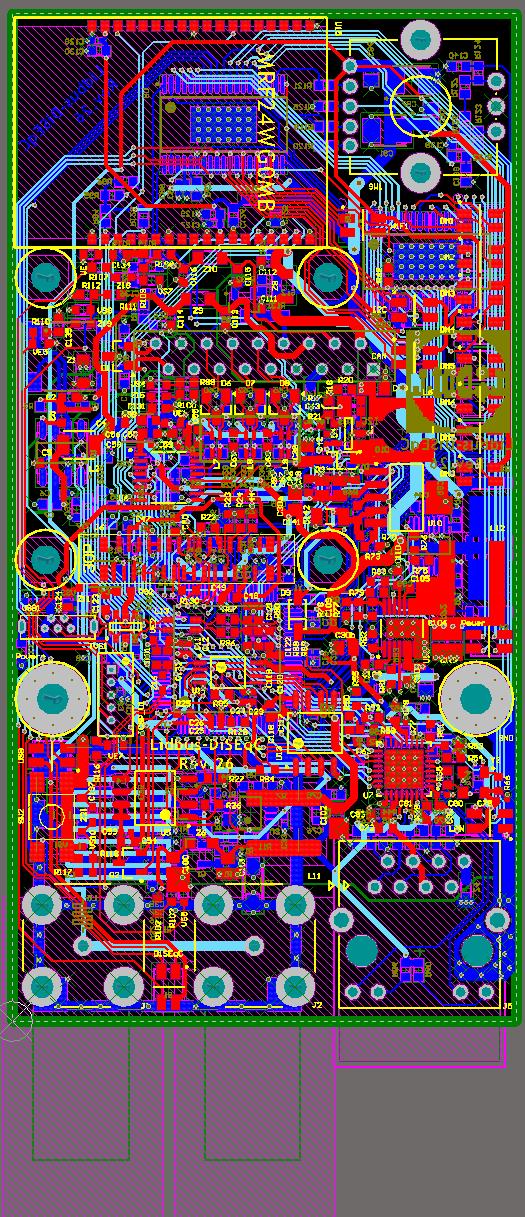
die Platine der CPU Einheit ist soweit fertig und sollte in 14 Tagen von den Chinesen hier eintreffen, dann gehts ans Bestücken und programmieren im Anhang eine Vorschau
wer noch Ideen zum Projekt hat nur her damit
,möchte mal eine neue Bastelei vorstellen inspiriert vom letzten Sattreffen zum Thema Polarizer von Keuz und DigiSat.
Ziel ist Schrittmotoren, BLDC, Sensoren, etc. direkt über DiSEqC-Befehle zu steuern.
Aufgebaut ist das ganze Modular als Bussystem, d.h. jeder Motortreiber oder jede Sensorschnittstelle erhält eine eigene Platine. Es lässt sich so flexibel erweitern.
Die Übertragung der Daten erfolgt von der CPU-Einheit via CAN-Bus oder I²C. CAN eher gedacht für externe Sensoren o. Geräte mit langen Leitungen. I²C erfolgt auf dem Bus ebenfalls über Differential (PCA9616) um Störungen zu vermeiden. Jede Einheit hat eine eigene wählbare Adresse. Abmessungen je Komponente 5x10cm für Sensoranschlüsse 5x5cm. Diese Größen lassen sich (auch 4-lagig) recht günstig in China fertigen.
CPU Einheit:
- Die Stromversorgung erfolgt im Ruhezustand über den Tuner, sobald es am Bus Arbeit gibt wird ein externes Netzteil zugeschalten um z.B. die Motortreiber zu speisen. Anschließend geht das System wieder in den Standby.
- 2x F-Buchsen zum Durchschleifen
- LAN für WebInterface und Updates
- 32-Bit CPU (PIC32)
- zusätzlich ext. Serieller 1Mbit SQI-RAM und 64Mbit SQI-Flash
- 128x128 RGB-OLED Display für Statusanzeige
- 24-Bit RGB LED Meter
- USB für Updates
- WiFi
- Drehencoder für Bedienung
Motor-Treiber:
- für kleine Schrittmotoren (bis 0,5A á Phase) Treiber (Trinamic TMC260) mit internem Mosfet Stromversorgung über Bus 12V max. 1,5A
- für große Schrittmotoren (max. 8A á Phase) Treiber (TMC262) mit externen Mosfet Stromversorgung über Hochstromschraubkontakte an Busplatine (gleichzeitig Befestigung)
- evtl. noch Treiber für 3-Phasen Gleichstrommotoren
Sensoren:
- Endschalter
- Winkelsensoren
- Kompasssensoren
Sonstiges:
- z.B. Relaisplatine
die Platine der CPU Einheit ist soweit fertig und sollte in 14 Tagen von den Chinesen hier eintreffen, dann gehts ans Bestücken und programmieren im Anhang eine Vorschau
wer noch Ideen zum Projekt hat nur her damit



 )
)